






Článek
Článek si také můžete poslechnout v audioverzi.
„Prosím vás, my jsme rádi, že tak věříte našemu antikoliznímu systému,“ nachomýtl se ke skupince čekajících kameramanů jeden z organizátorů. „Ve všech případech nám zafungoval. Ale přece jen, je to tramvaj, je to experiment, tak se prosím pojďte postavit stranou.“
Když jsou novináři mimo koleje, začíná zlatý hřeb akce: Ukázka autonomní jízdy české tramvaje, které do cesty vjede osobní automobil. Aby to měl palubní počítač těžší, jsou na trati dvě překážky. Jedna je mimo koleje a mimo dosah tramvaje. Druhá – atrapa napodobující zadní část osobního auta – už do kolejí zasahuje výrazně. Vysílačka oznamuje, že je vše připraveno, a na plzeňské tramvajové smyčce se rozjíždí „první česká autonomní tramvaj“.

Tramvaj úspěšně zastavila a zabránila kontaktu s „autem“, což byla z bezpečnostních důvodů speciální atrapa. V případě, že by došlo ke kolizi, atrapa by odjela, aniž by napáchala výrazné škody. Ukázka proběhla za dohledu hasičů.
Zastavení se povedlo, prý stejně, jako tomu bylo během předchozích experimentů. Počítačový systém pomocí trojrozměrného radaru (tzv. LIDAR) a kamer seznal překážku v zorném poli, na základě matematického modelu spočítal, že hrozí kolize, a aktivoval brzdění i hlasitou zvonkovou signalizaci, důvěrně známou obyvatelům měst protkaných tramvajovými trolejemi.
Pro novinářské kamery šlo určitě o nejzajímavější část prezentace. Ale to, že umí tramvaj sama zastavit, není žádná novinka. Tramvaje Škoda třeba antikolizní systém provozují v některých městech už bezmála dva roky.
Hlavní přínos projektu – podpořeného grantem Technologické agentury ČR – je tvorba celé provázané platformy zaměřené na kolejová vozidla. Nejde tedy jen o tramvaj samotnou, ale také o mapování, simulaci a dynamickou aktualizaci celého prostředí kolem ní. Miloš Železný, děkan Fakulty aplikovaných věd Západočeské univerzity v Plzni, nám to vysvětlil následovně: „Každá firma a univerzita přispívají svou specializací a společně tvoříme skládačku, která umožní vytvořit plně funkční autonomní systém.“
Spolupráce senzorů, spolupráce lidí
Tramvaj totiž není auto a už jen z jejích fyzikálních vlastností vyplývá, že nároky na provoz samořídící tramvaje jsou jiné než třeba na autonomní taxík. Především je tu hmotnost. Třicet tun na kolejích, uvnitř třeba stovka cestujících, to je velká zodpovědnost. Abychom mohli tuto zodpovědnost – napřed částečně, jednou třeba úplně – svěřit počítači, potřebujeme podle vědců vytvořit komplexní informační systém.
Výzkumný projekt nese zkratku Didymos – digitální dynamické dvojče – a cílem bylo integrovat různé části do dynamické a provázané platformy. To se týká jak různých počítačových systémů a senzorů, tak různých firem či výzkumných institucí, které jejich činnost a součinnost obstarávají.
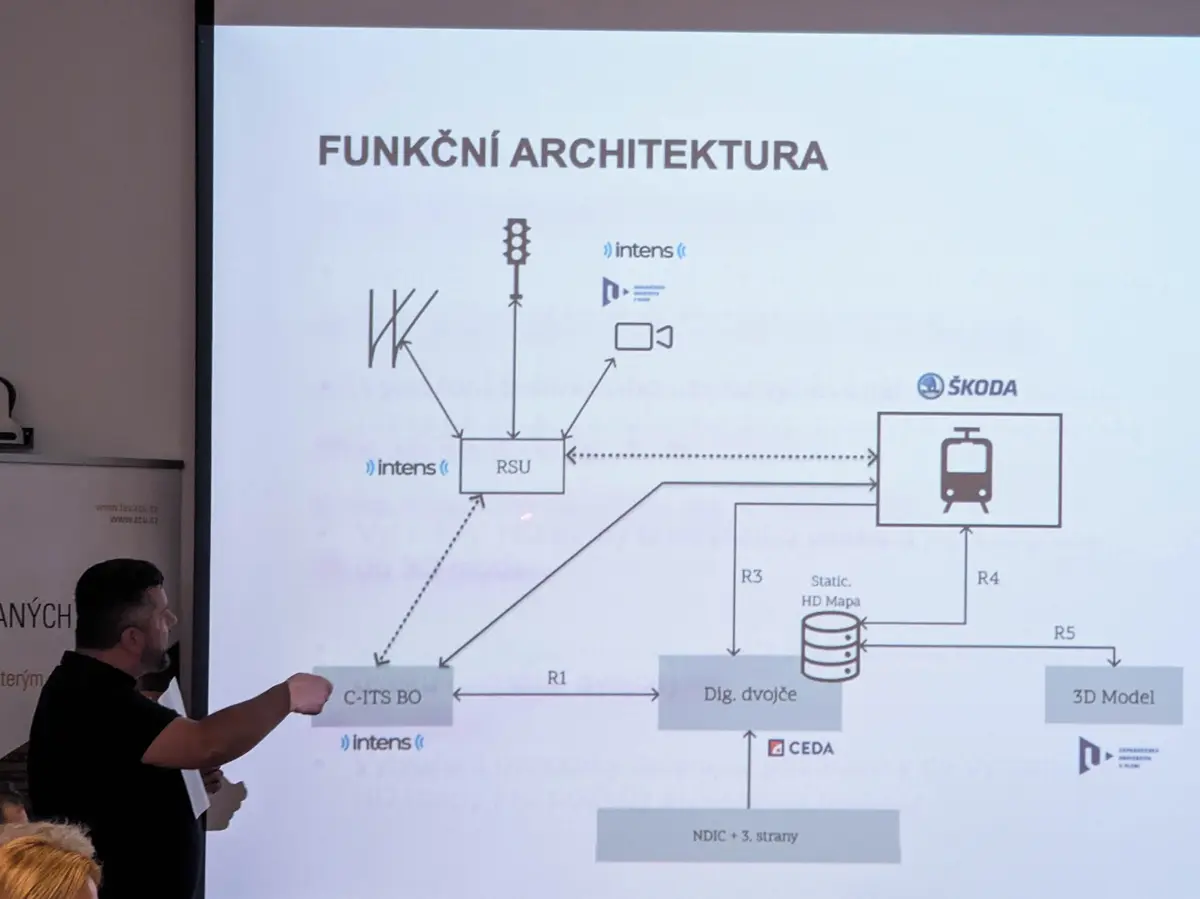
Zdeněk Lokaj z Fakulty dopravní ČVUT ukazuje novinářům jednotlivé části experimentálního systému Didymos.
Ze schématu je vidět, že ústředním prvkem není samotná tramvaj, ale právě ono „digitální dynamické dvojče“, kterému projekt vděčí za jméno. Z pohledu výzkumníků jde totiž o dlouhodobě zajímavější problém. V rámci projektu si tak vyzkoušeli integraci celé řady různých technologií. A v rámci každé technologie se v praxi objeví zádrhele, které je nutné vyřešit. Takové know-how se bez reálných experimentů získat nedá.
Hlavní části projektu
Digitální mapy – nasnímání oblasti kamerami a senzory ve vysokém rozlišení umožnilo vytvořit 3D mapu oblasti, ve které se tramvaj pohybuje.
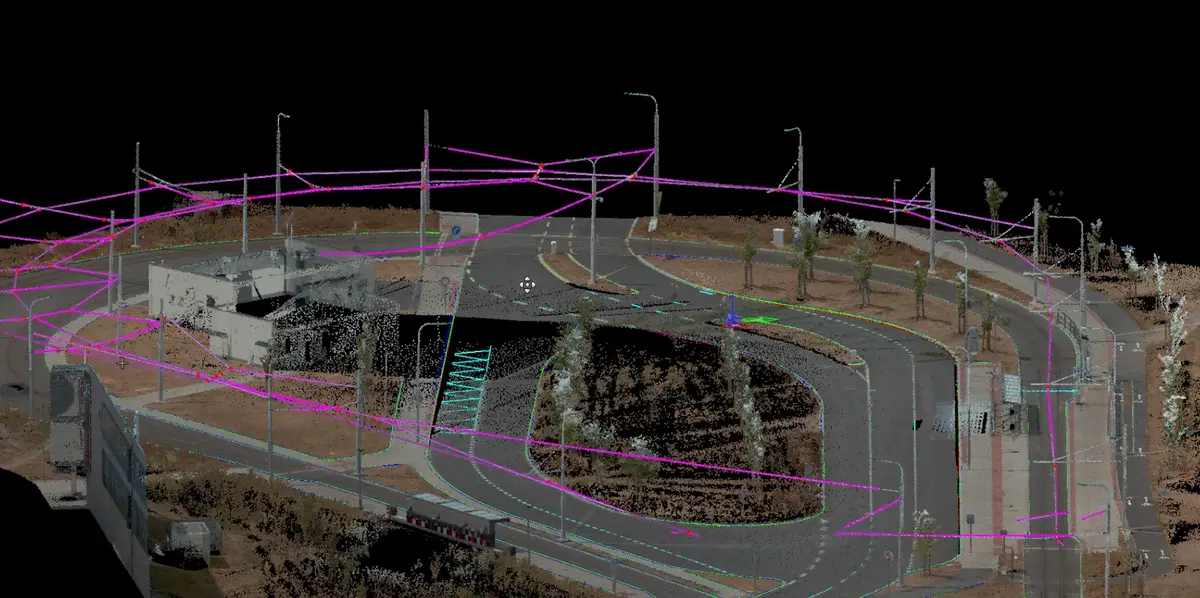
Trojrozměrné znázornění digitální mapy prostředí, tramvajová smyčka nedaleko Fakulty aplikovaných věd Západočeské univerzity v Plzni.
Tramvaj vybavená speciálními senzory – testování probíhalo s tramvají Škoda 40T vybavenou antikolizním systémem.
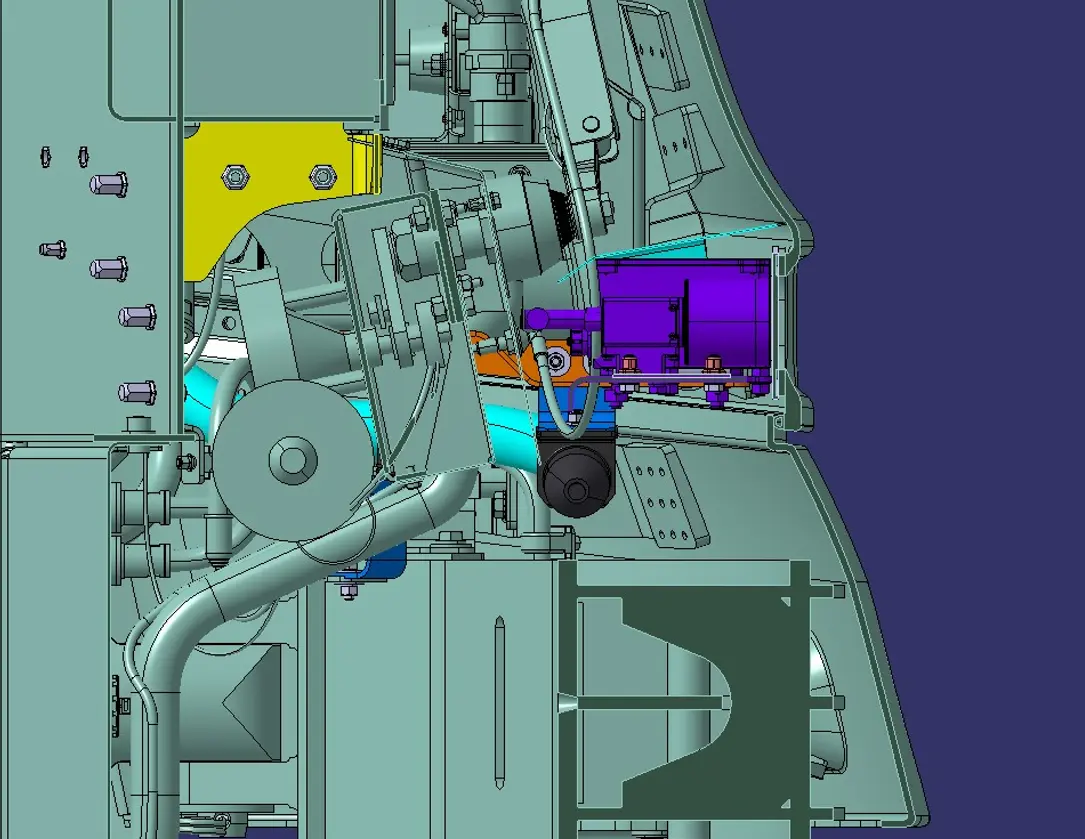
Osazení tramvaje Škoda 40T antikolizním systémem.
Detekce objektů pomocí LIDAR – díky kamerám a LIDAR umí tramvaj detekovat objekty, které jsou přímo před ní, i objekty v okolí kolejí.
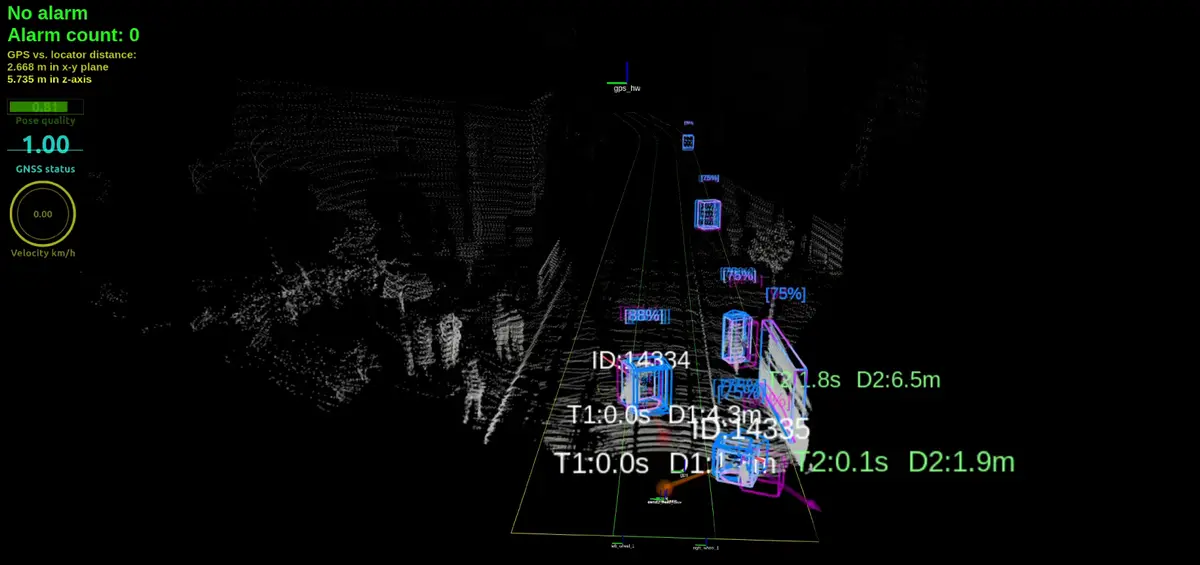
Takto „vidí“ tramvaj, co se před ní děje, a pomocí strojového učení rozpoznává možné překážky.
Sledování okolní infrastruktury – pomocí technologie C-ITS umí tramvaj komunikovat s městskou infrastrukturou, a dostává tak informace o semaforech nebo o projíždějící sanitce apod.

Displej ukazuje řidiči tramvaje informace o aktuálním stavu semaforů.
Aktuální záběry z kamer – umělá inteligence v reálném čase vyhodnocuje záběry z kamer, a může tak tramvaj varovat s předstihem, pokud se vyskytne neobvyklá situace či překážka.
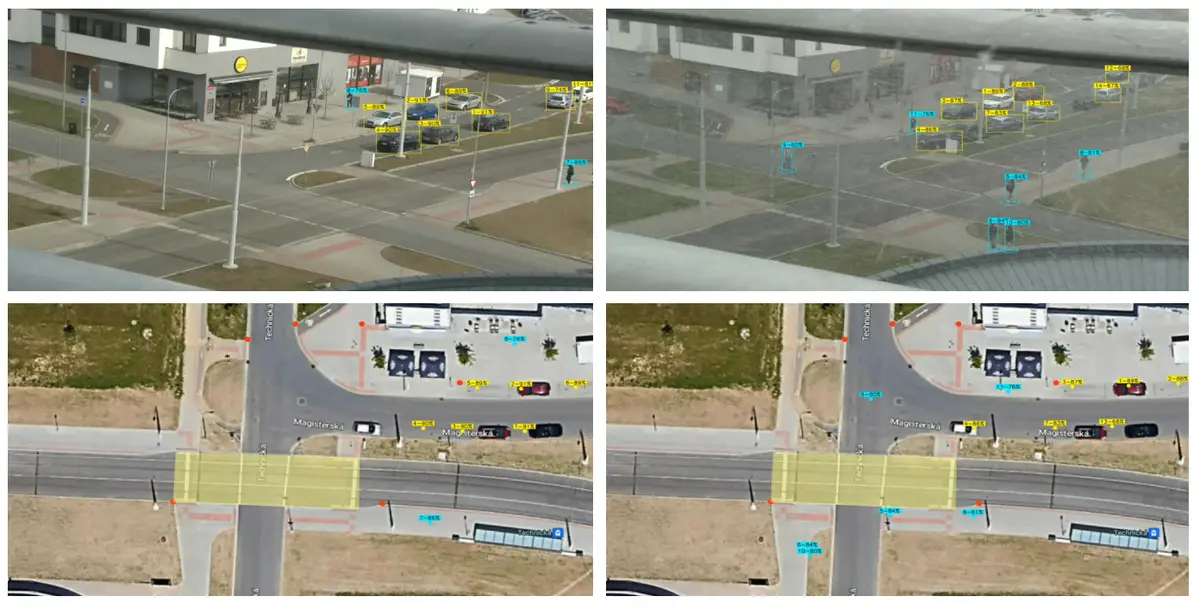
V rámci projektu byla kamera umístěna na budovu Západočeské univerzity v Plzni.
V žádném případě se nejedná o hotový projekt. Automaticky řízené tramvaje se do českých měst hned tak nevydají. Brání tomu nejen překážky technické, ale také pochopitelná opatrnost legislativní.
Ministr dopravy Martin Kupka, který se na prezentaci rovněž přijel podívat, ovšem uvedl, že budoucnost městské dopravy se podle něj ubírá právě tímto směrem: „Tramvaj s chytrými bezpečnostními prvky je přesně typ potřebné inovace, která je konkrétním výsledkem spolupráce technologických společností se vzdělávacími institucemi. Je to také další krok k tomu, aby byla doprava, nejen v Plzni, ale postupně i po celé České republice, bezpečnější, efektivnější a ekologicky šetrnější.“
Kupka také pochválil zapojení českých univerzit a firem, které v Plzni společné výsledky 22. července prezentovaly: „Je to něco konkrétního, co lze vzít a ukázat, že tady Česká republika postupuje dopředu a představuje konkrétní důležité projekty pro automatizaci dopravy.“
V čem je hlavní přínos projektu Didymos?
Na otázky odpovídá Miloš Železný, děkan Fakulty aplikovaných věd Západočeské univerzity v Plzni.
Viděli jsme ukázky, které ukazují výstup celého projektu Didymos, tvorby digitálního dynamického dvojčete tramvaje. Jak byste zhodnotil přínos tohoto projektu?
Největší přínos vidím v integraci všech těchto celků s důrazem na bezpečnost. Tramvaj ví, že má cestu čistou a může bezpečně jezdit autonomně. Projekt také ukazuje, jak mohou moderní technologie a spolupráce mezi různými subjekty přinést konkrétní výsledky, které zvyšují bezpečnost, efektivitu a udržitelnost veřejné dopravy.
Celkový přínos spočívá v tom, že postupně směřujeme k autonomii vozidel městské hromadné dopravy, v tomto případě tedy kolejových vozidel, tramvají. Přínos je v tom, že pokud budou ty tramvaje jezdit autonomně, tak se zvýší efektivita práce a může se zvýšit bezpečnost. Některé první pokusy s autonomními vozidly mohou ukazovat, že může docházet k nehodám. Cílem je vytvořit systém, který by byl proti tomuto co nejvíce imunní.
Jakým způsobem tento systém digitálního dvojčete zajišťuje zvýšení bezpečnosti?
Výhoda systému je v tom, že používá data z co nejvíce senzorů. Nejenže má tramvaj vlastní senzory, ale využije i senzory jiných vozidel a městské infrastruktury. Komunikuje s infrastrukturou, komunikuje s ostatními vozidly, a tak může dostávat informace o tom prostředí, co se děje na zastávce, co se děje za rohem, kam samotné vozidlo nevidí.
Může dostávat informace od jiných vozidel, která byla svědkem nějaké události, a tím dostat informaci dopředu. Třeba když se někde něco stane, tramvaj může zvolit objízdnou trasu a podobně.
To je ten dlouhodobý cíl. Z krátkodobého hlediska tady došlo k vytvoření digitálního dvojčete a jakési první autonomie vozidla.
Technologie „tramvajového autopilota“ musí navíc být nejen certifikovaná, spolehlivá a vyzkoušená, ale také důvěryhodná. Jde přece jen o zdraví a životy desítek a stovek cestujících. I proto se postupuje krok za krokem.

Ukázka projektu Didymos v Plzni. Nejradši by se kameramani postavili přímo do kabiny řidiče. Ale to podmínky testu neumožnily. V tramvaji mohli být na základě schválených pravidel pouze lidé bezprostředně nezbytní k úspěšnému průběhu testu.
Řidič tramvaje třeba musí zdálky odhadnout, že je někdo cizinec, který možná nemá zkušenosti s tím, že má na přechodu třicetitunová tramvaj přednost. Nebo usoudit, že hrající si dítě – přestože je nyní mimo koleje – se může nečekaně rozběhnout, a uzpůsobit tomu rychlost nebo použít výstražný signál k důraznému preventivnímu ukáznění.
Tramvaj bez řidiče tak v českých městech v dohledné době nepotkáme. Řidiči se nicméně mohou těšit na to, že budou mít k dispozici stále více prvků, které se postupně budou propojovat a integrovat do většího celku. Systém, který pak jednou řidiče nahradí, nebude spoléhat jen na dvě oči a praxí získané instinkty. Bude vycházet z ohromného množství dat a v reálném čase se přizpůsobí aktuální situaci.







